H come Hamilton! Quaternioni ed ipercomplessi
La prima volta che si incontrano i numeri complessi, di solito a liceo o alle scuole superiori, ci si convince spesso, che arrivati sin qui non può esserci altro; nel senso che i numeri complessi, si crede, siano il punto d’arrivo dopo il quale non esiste nessun altro tipo di numero. Ma in matematica non ci sono “limiti”… anzi! Questi limiti “vanno all’infinito” scherzando un pò con le parole… Abbiamo visto, che, partendo dai numeri naturali, (battezzati da Kronecker come una creazione divina) si è giunti, nel corso dei secoli, dopo lunghi periodi di riflessione, scelte errate, grandi passi e grandi intuizioni, talvolta vicoli ciechi – al mondo straordinario dei numeri complessi.
Ma perché fermarsi? Non si potrebbe pensare di riapplicare il procedimento di estensione? I numeri complessi furono introdotti nel ‘500 dai matematici italiani, per motivi assai problematici inerenti alla risoluzione delle equazioni. Se però si prova ad estendere ulteriormente l’insieme \( \mathbb C\), si entra in un nuovo mondo, forse un pò meno applicabile rispetto a \( \mathbb C \) se non in contesti specialistici e di matematica pura e/o di teoria dei gruppi ma comunque interessante – questi oggetti si chiamano: ipercomplessi, o anche quaternioni e saranno l’oggetto di questa breve discussione.
I quaternioni non risalgono alla notte dei tempi! La loro scoperta, dovuta al genio di Hamilton risale circa al 1843, quado, dopo aver
ricercato senza successo un’estensione tridimensionale, ne formulò una con
dimensione quattro: i quaternioni
, appunto. Egli fece questa scoperta mentre
stava passeggiando lungo un canale a Dublino, quando improvvisamente
gli venne in mente la soluzione nella forma dell’equazione \(i
^2 = j^2 = k^2 =
ijk = −1\).
Egli incise l’equazione sul lato del Ponte Brougham; ora lì è
presente una lapide che racconta la scoperta.
Definizione
Il modo più semplice di esprimere un generico quaternione è la sua rappresentazione vettoriale
$$ {\Large q = t + u\color{#008080}{i} + v\color{#008080}{j} + w\color{#008080}{k} } $$ Osservate una netta somiglianza con la struttura dei numeri complessi. In questo contesto, si aggiungono due ulteriori “componenti” ( j) e ( k), che “aumentano” per così dire la “dimensione immaginaria” dello “spazio” dei quaternioni. Naturalmente la definizione è data anche nella forma insiemistica che vede i quaternioni come una estensione dei numeri complessi. Pertanto possiamo definire l’insieme \( {\mathbb H} \) come:
$$\left\{ q = a + bi + cj + dk \hspace{2mm} | \ \hspace{2mm} a, b, c, d \in {\mathbb R}, \hspace{2mm} \ i^2 = j^2 = k^2 = ijk = -1 \right\} $$

In questo insieme possiamo definire due operazioni una somma ed un prodotto che conferiscono, come già accennato, ad ( {\mathbb H} ) una struttura algebrica di spazio vettoriale
di dimensione ( 4): \( \mathrm{dim}(\mathbb H) = 4 \), avente base: $${1, i, j, k}$$
$$ \diamond{\large \diamond}\diamond $$
Definizione
Nell’insieme ( \mathbb H ) è definita una somma ed un prodotto. Consideriamo due quaterioni \(q_1 = a_1 + b_1i + c_1j + d_1 k\) e \( q_2 = a_2 + b_2i + c_2j + d_2k \) valgono allora le seguenti operazioni elementari:
$$ q_1 + q_2 = (a_1 + b_1i + c_1j + d_1k) + (a_2 + b_2i + c_2j + d_2k) = (a_1+a_2) + (b_1+b_2) + (c_1+c_2) + (d_1+d_2) $$
$$ q_1 – q_2 = (a_1 + b_1i + c_1j + d_1k) – (a_2 + b_2i + c_2j + d_2k) = (a_1-a_2) + (b_1-b_2) + (c_1-c_2) + (d_1-d_2) $$
$$ {\Large i^2 = j^2 = k^2 = ijk = -1 }$$
I quaternioni formano un corpo non commutativo; soddisfano quindi tutte le proprietà usuali dei campi, quali i numeri reali, complessi, tranne la proprietà commutativa del prodotto. Il prodotto tra quaternioni risulta quindi anticommutativo in riferimento alle seguenti figure


$$ q^{-1} = {q^* \over |q|^2} \rightarrow qq^{-1} = \ = q{q^* \over |q|^2}={|q|^2 \over |q|^2}=1 $$
$$ {\small \begin{aligned}q_1q_2 &= (a_1 + b_1i + c_1j + d_1k) (a_2 + b_2i + c_2j + d_2k) \\ &= (a_1a_2 + b_1b_2 – c_1c_2 – d_1d_2) + (a_1b_2 + b_1a_2 + c_1d_2 + c_2d_1)i \\ &+ (a_1c_2 + c_1a_2 + d_1b_2-b_1d_2)j +(a_1d_2+d_1a_2 + b_1c_2 + c_1b_2)k \end{aligned}} $$
Per i quaternioni vale la seguente proprietà molto suggestiva, la possibilità di esprimere un quaternione nella sua rappresentazione
b-complessa, ossia, come somma di due numeri complessi: $$q = \bigl( a+ib\bigr) + \bigl( c+id\bigr)j $$
Possiamo scrivere in un modo assai compatto tale proprietà nel modo seguente: $${\Large \mathbb H = \mathbb C \oplus \mathbb Cj }$$
Coniugato e Norma
Si definisce quaternione coniugato di \( q\) e si indica \( q^\) il seguente elemento di ( \mathbb H\): $$ q^ = a -ib -cj – dk $$ Valgono le seguenti proprietà per il coniugato:
$$ (q_1q_2)^* = q_1^q_2^ $$
$$ (q_1+q_2)^* = q_1^+q_2^ $$
$$ (q^)^ = q $$
Per ogni quaternione \( q \in \mathbb H\) è definita la norma dalla seguente espressione:
$$ ||q|| = \sqrt{qq^*} = \sqrt{a^2+b^2+c^2+d^2} \in \mathbb R^{\ge} $$
L’insieme \( \mathbb H \) dei quaternioni, è uno spazio vettoriale su \( \mathbb R^4\), in particolare esiste un isomorfismo \( \xi : \mathbb H \rightarrow \mathbb R^4 \) che fa corrispondere ogni vettore a \( 4\) componenti ad un quaternione. Pertanto la norma
indotta di \( \mathbb R^4 \) corrisponde alla norma su \( \mathbb H\).
$$ ||q||{\mathbb R^4} =||\begin{pmatrix} a \ b \ c \ d \end{pmatrix}|| = \sqrt{a^2+b^2+c^2+d^2} = ||\xi||{\mathbb H} $$
E’ facile dimostrare che la norma soddisfa alla disuguaglianza di Cauchy-Schwarz ed a tutte le proprietà tipiche della norma in \( \mathbb R^n \), inclusa la disuguaglianza triangolare.
Rappresentazione matriciale
I quaternioni si prestano a moltissime rappresentazioni. Abbiamo visto la possibilità di esprimere un numero \( q \in \mathbb H\)
come somma di due numeri complessi (rappresentazione b-complessa). E’ possibile esprimere un quaternione nella cosiddetta rapprsentazione matriciale.
Al quaternione \( q = a + bi + cj + dk \), associamo le seguenti \( 4\) matrici complesse:
$$ {\small \mathrm 1 = \begin{pmatrix} 1 && 0 \\ 0 && 1 \end{pmatrix},
\hspace{1cm} \mathbb I = \begin{pmatrix} i && 0 \\ 0 && -i \end{pmatrix}, \hspace{1cm},
\mathrm J = \begin{pmatrix} 0 && 1 \\ -1 && 0 \end{pmatrix} \hspace{2cm},
\mathrm K = \begin{pmatrix} 0 && i \\ i && 0 \end{pmatrix} }$$
In questo modo possiamo associare a \( q\) la matrice somma di base:
$$ \mathrm Q = \mathrm 1a+ \mathrm Ib + \mathrm Jc + \mathrm Kd = \begin{pmatrix} [a+ib] && [c+id] \\ [-c+id] && [a-ib] \end{pmatrix} =
\begin{pmatrix} z && -w^* \\ w && z^* \end{pmatrix} $$
Geometria polare e terna quaternionale di Hamilton
Per meglio comprendere il significato dei quaternioni e di come essi si plasmano in uno spazio tridimensionale (3D) analizziamone la loro geometria.
Immaginiamo di essere in uno spazio 3-dimensionale euclideo (quello classico per intenderci, che si studia nei corsi di algebra e geometria);
ebbene qui possiamo definire
una terna ( \( {\large i, j, k } \)) con delle particolari proprietà che più avanti mostreremo – detta: terna quaternionale 3D o (terna di Hamilton). Possiamo rappresentare la nostra terna
come un sistema di assi mutuamente ortogonali corrispondenti ai simboli \( ( i, j, k )\) nel modo classico come in figura.

La terna in questione va intesa in senso destrorso (vale la regola della mano destra), e
quindi le rotazioni positive sono quelle in senso orario. Mentre i numeri complessi sono ideali per rappresentare rotazioni nel piano (complesso),
i quaternioni sono adatti a rappresentare rotazioni nello spazio tridimensionale euclideo attorno ad un asse.



Introduciamo l’insieme dei quaternioni unitari \( \mathbb H^1\). Un quaternione si dice unitario se ha norma uno: \( ||q|| = 1\).
$$ {\large \mathbb H^1 = {q \in \mathbb H \hspace{1mm} |\hspace{2mm} ||q||=1}} $$
Analogie con i numeri complessi
L’aver introdotto \( \mathbb H^1\), ci consente di fare molte analogie con i complessi unitari.
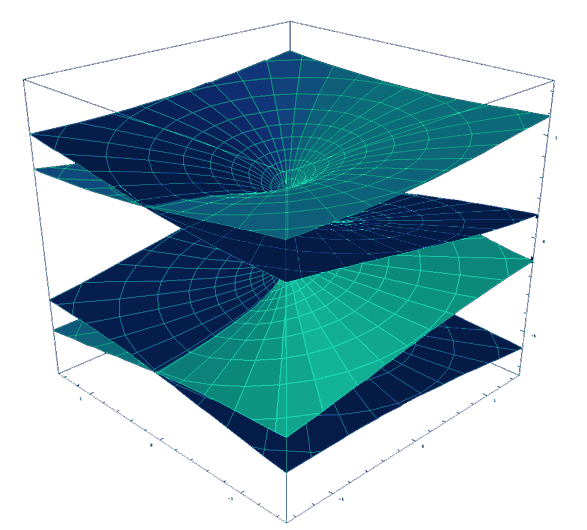
Per i quaternioni infatti esiste una rappresentazione polare del tipo di quella valida per i numeri complessi:
Per capirlo, se consideriamo un quaternione \( q = a+bi+cj+dk \) si può osservare che se la parte immaginaria
\( \Im m{q} = bi+cj+dk \) è diversa da \( 0\), il vettore \( {\Im m{q} \over |\Im m{q}|} \in \mathbb{S^2} \)
appartiene alla sfera unitaria. Per ogni quaternione \( q \in \mathbb H \), si definisce rappresentazione polare la seguente espressione:
$${\large q = ||q||\left(\cos(\theta) + {\Im m{q}\over |\Im m{q}|}\sin{\theta} \right)} $$
E’ possibile mostrare inoltre, che l’insieme \( \mathbb H^1 \) è strettamente correlato al gruppo \( \mathrm{SO_3(\mathbb(R))} \) delle rotazioni tridimensionali e per questo motivo i quaternioni vengono pesantemente impiegati in contesti legati alla
meccatronica alla robotica ed alla computer grafica dove le rappresentazioni tridimensionali sono il pane
quotidiano degli ingegneri. Non vi dimostro in questa sede tale affermazione, perché il tutto risulta essere estremamente oneroso (vi dovrete fidare), ma sappiate che vi prometto di farlo a breve 😉
$${\large \phi : \mathbb H^1 \rightarrow \mathrm{SO_3(\mathbb(R))} }$$
Rotazioni
la proprietà più importante di un quaternione è che esso rappresenta una rotazione in \( \mathbb R^3\).
Una qualunque rotazione tridimensionale può essere espressa nella cosiddetta notazione asse-angolo \( \mathrm R = e^{\theta\hat{u}} \).
Volendo rappresentare sotto forma di quaternione, tale rotazione possiamo scrivere:
$$ {\large q = e^{\theta\hat{u}} = \begin{bmatrix} \cos({\theta \over 2}) \ \hat{u}\sin({\theta \over 2}) \end{bmatrix} } $$
dove ( \theta) è l’l’angolo di rotazione e \( \hat{u}\) un versore tridimensionale. in questo esempio abbiamo descritto la rotazione
di un angolo \( \theta\) attorno all’asse \( \hat{u}\). un quaternione \( q = q_1 + q_2i + q_3j + q_4k \) può essere trasformato e/o convertito in una vera e propria matrice di rotazione
$$ {\small \begin{pmatrix} q_1^2+q_2^2-q_3^2-q_4^2 && 2q_2q_3-2q_1q_4 && 2q_2q_4+2q_1q_3 \\
2q_2q_3+2q_1q_4 && q_1^2-q_2^2+q_3^2-q_4^2 && 2q_3q_4-2q_1q_2 \\
2q_2q_4-2q_1q_3 && 2q_3q_4+2q_1q_2 && q_1^2-q_2^2-q_3^2+q_4^2 \end{pmatrix} } $$
Un finale alla “Frobenius”, “Cayley-Dickson”
La domanda lecita è: Quando si arresta questo processo di estensione insiemistica? Se continuiamo ad estendere gli insiemi dove arriviamo?
La risposta con cui chiudiamo questo articolo è data dal Procedimento di Cayley-Dickson per l’estensione insiemistica e dal Teorema di Frobenius
che afferma una cosa molto semplice: Ogni spazio vettoriale reale a dimenione finita, che sia un corpo (anche non commutativo) è isomorfo o a \( \mathbb R\) o a \( \mathbb C\) o ad \( \mathbb H\). In questo modo le estensioni sono possibili ma il prezzo che bisogna pagare è che via via, raddoppiando la dimensione, si perdono alcune proprietà, ad esempio l’estensione dei quaternioni, gli ottonioni \( \mathbb O \) non sono associativi, i sedenioni non sono alternativi… e così via…
\( \langle \) Fine \( \rangle\)